
About
Featured Publications
J. Petangoda, C. Samarakoon, and P. Stanley-Marbell.
Will appear at the 'Machine Learning with New Compute Paradigms' (MLNCP) Workshop at NeurIPS 2024.
J. Couchman, O. Kaparounakis, C. Samarakoon, and P. Stanley-Marbell. ArXiv preprint: arXiv:2410.03261[eess.SY].
C. Samarakoon, H.W. Choi, S. Lee, X.B. Fan, D.W. Shin, S.Y Bang, J.W. Jo, L. Ni, J. Yang, Y. Kim, S.M. Jung, L. Occhipinti , G. Amaratunga, & J.M. Kim.
Appears in Nature Communications. Issue 13. DOI:10.1038/s41467-022-31853-9.
C. Samarakoon.
Ph.D Thesis, University of Cambridge. Supervised by Prof. G. Amaratunga, Prof. J.M. Kim, & Prof. P. Stanley-Marbell.
Available on Apollo (the University of Cambridge Repository).
V. Tsoutsouras, O. Kaparounakis, B.A. Bilgin, C. Samarakoon, J. Meech, J. Heck, & P. Stanley-Marbell.
Appears in the proceedings of MICRO-54: 54th IEEE/ACM International Symposium on Microarchitecture. DOI:10.1145/3466752.3480131.
S.M. Jung, T.H. Lee, S.Y. Bang, S.D. Han, D.W. Shin, S. Lee, H.W. Choi, Y.H. Suh, X.B. Fan, J.W. Jo, S. Zhan, J. Yang, C. Samarakoon, Y. Kim, L. Occhipinti, G. Amaratunga, & J.M. Kim.
Appears in npj Computational Materials. Volume 7, issue 1. DOI:10.1038/s41524-021-00591-9.
S.Y. Bang, Y.H. Suh, X.B. Fan, D.W. Shin, S.H. Lee, H.W. Choi, T.H. Lee, J. Yang, S. Zhan, W. Harden-Chaters, C. Samarakoon, L.G. Occhipinti, S.D. Han, S.M. Jung, & J.M. Kim.
Appears in Nanoscale Horizons. Volume 6, issue 1. DOI:10.1039/D0NH00556H.
Projects
Sheffield Eco Motorsport - Design and Fabrication of a Prototype Electric Car
Sept. 2015 - Aug. 2017
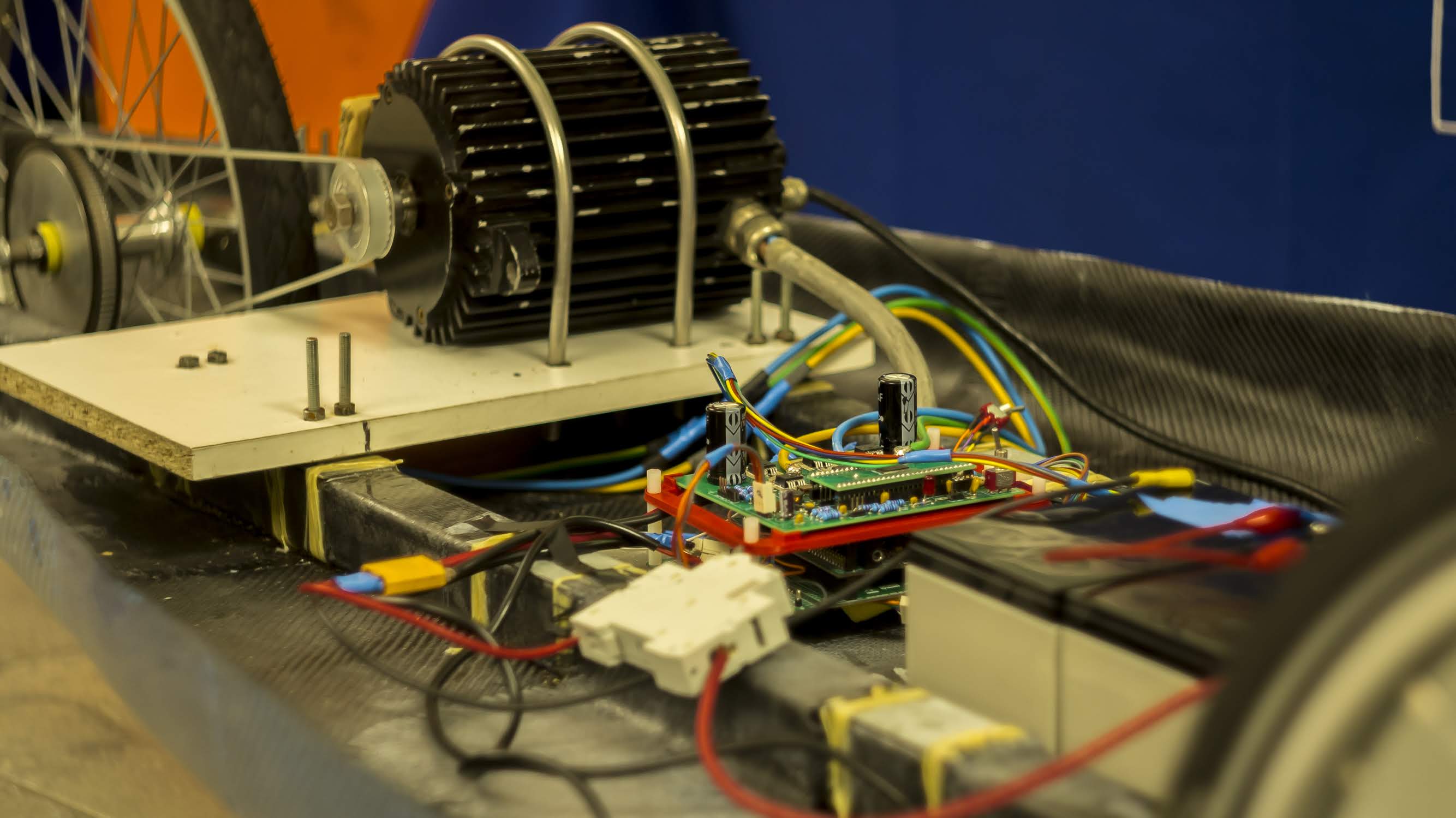
Sheffield Eco Motorsports was an interdisciplinary project focused on designing and fabricating an energy efficient prototype electric car to compete at the Shell Eco Marathon. As the head of Electrical and Control Systems, I lead a team of 6 students to design, fabricate and test a 3-phase BLDC motor drive and a 36V 40A (pk) Battery management system. We also designed and fabricated a custom miniature BLDC motor. In the later stages on the project, myself and the founder of the group did a 5 layer carbon fibre wet-layup to fabricate the bottom half of the monocoque and presented the partially completed car at the EEE department's 100th anniversary. At that point, this was the largest carbon fibre part fabricated in the faculty.
HomepageDesign of an Autonomous Robotic Porter
Sept. 2016 - July 2017

The aim of the project was to create a fully autonomous robotic porter capable of delivering mail and supplies to offices and labs in the main engineering building in the university. At the end of the project Robot was able to operate semi autonomously provided it had access to a map of the building. Given the target destination, it was capable of calculating an optimal path through the building and was able to safely negotiate obstacles and unexpected events with minimal human intervention. A preliminary investigation into the possible use of vision based simultaneous localisation and mapping (SLAM) framework was carried out but wasn’t fully implemented.
Design of an Autonomous RC Car
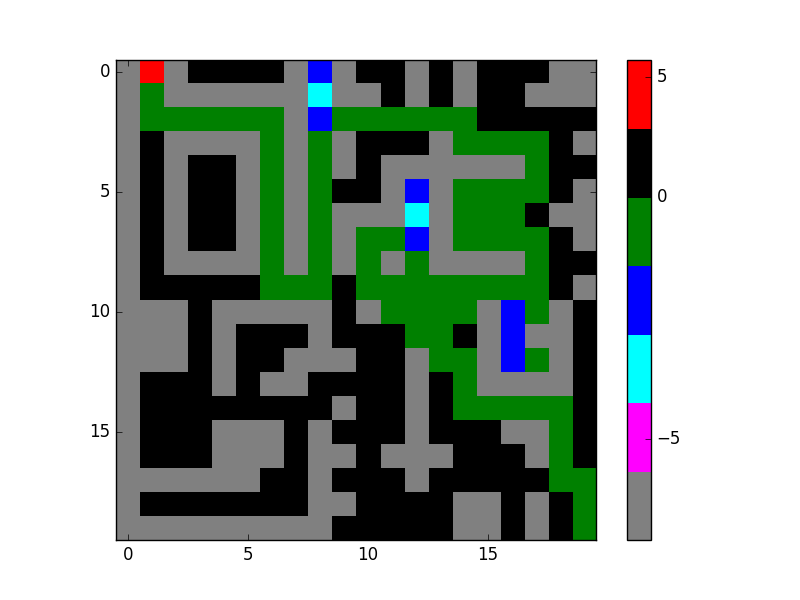
The aim of the project was to modify an old remote controlled car to enable it to autonomously navigate an unknown environment towards a goal. The power electronics and the localisation/navigation algorithms were developed from scratch. The target was to create a reinforcement learning scheme to learn the mapping between a required motion and the control signals using motor blabbing to forgo the need for developing a mathematical model for the car. Furthermore, it was proposed that by calculating the correspondence between 2 cameras placed on the RC car and creating a depth map, the algorithm will be able to make decisions in order to avoid obstacles and move towards the destination. A pathfinding algorithm with the ability to navigate an unknown environment with partial observability using a simple heuristic was developed. The algorithm was fast, deterministic with a small overhead. The Project was put on hold and the code written and the ideas generated were adapted to be used in the Robotic porter project.
Making sense of Data in the Media
Oct. 2015 - Dec. 2015
Making sense of Data in the Media is an online course designed by the Sheffield Methods institute for Future learn. The course aims to explain common ways statistical data is misrepresented in media (intentionally or by accident) and how one can cut 'through the confusion to decide what numbers reveal, when and why they (sometimes deliberately) mislead, and how to determine what is 'fake news'. I on the graphic design and animation production of the videos that make up the course.
Design of an Edge Termination Structure for a 6.5kV Clustered IGBT (CIGBT)
Sept. 2015 - July 2016
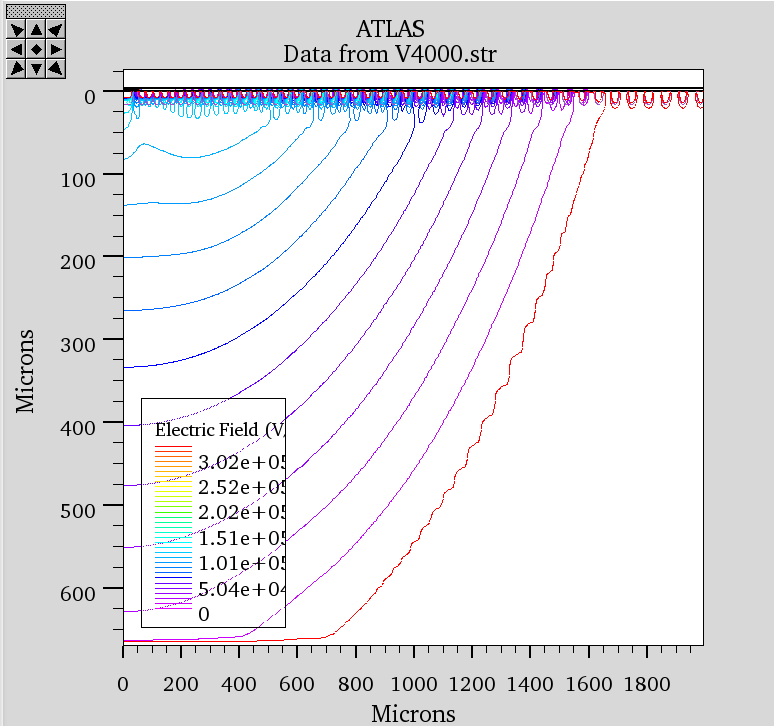
A conventional field limiting ring structure with a metal field plate was designed for a silicon (Si) based 6.5kV CIGBT. The structure was simulated using commercial TCAD tools and a sensitivity of the device’s performance to chemical and physical variations was evaluated. An investigation was carried out into termination miniaturisation and a Si-SiC heterojunction termination was proposed. Initial results indicated a 40% reduction in the termination size compared to a baseline Si device at breakdown using a 5 micron thick SiC substructure.
Surface Acoustic Wave Filter Design
Jan. 2015 - May 2015
A Surface acoustic wave (SAW) filter with bandpass characteristics was designed and fabricated onto a Lithium Niobate (LiNbO3) substrate. The performance of the filter was characterised and possible improvements were proposed.

Education
Ph.D in Engineering. Thesis title - "Perception-Aware Optimisation Methodologies for Quantum Dot Based Displays and Lighting"
First Class (Hons.) MEng in Electronic Engineering with Mappin Medal Honours
A*A*AAA at GCE Advanced Level and Welsh Baccalaureate Advanced Diploma.
Professional Experience
Software and AI systems Lead @ Cambridge Heartwear
Application Engineering Lead and Customer Growth Lead @ Signaloid
Research Associate in Probabilistic Computation Hardware @ Physical Computation Laboratory, University of Cambridge
Technical Consultant @ Kutuu Ltd., Gabrielle Izen Design, Sophia Victoria Joy Ltd., and Cocoba Ltd., UK.
AI Research Scientist @ Extract-AI, Singapore.
Research Assistant @ Grapples Project, Physical Computation Laboratory, University of Cambridge
Founding member, and Electrical and Control Systems Team Lead @ Sheffield Eco-Motorsports, University of Sheffield
Animator and Graphic Designer @ Sheffield Methods institute and Future-Learn
Assistant Electrical Circuit Designer @ Ministry of Education, Sri Lanka
Departmental Student Representative @ Faculty of Engineering, University of Sheffield
Teaching Experience
Teaching Assistant for IIA-GB3:RISC-V Processor Design @ Department of Engineering, University of Cambridge
Lab Demonstrator for IA - Integrated Engineering Project @ Department of Engineering, University of Cambridge
Teaching Assistant for 4B25:Embedded Systems for IoT @ Department of Engineering, University of Cambridge
Departmental Teaching Committee Representative @ Faculty of Engineering, University of Sheffield
Student Ambassador for Learning and Teaching @ University of Sheffield